The Mark Ortiz Automotive
CHASSIS NEWSLETTER
July 2017
Reproduction for free use permitted and encouraged.
Reproduction for sale subject to restrictions. Please inquire for details.
Reproduction of this material elsewhere should not be construed as
an endorsement or expression of any opinion, favorable or unfavorable, by me regarding
other information appearing in the same publication, site, or medium.
WELCOME
Mark Ortiz Automotive is a chassis consulting service primarily serving oval track and road racers. This newsletter is a free service intended to benefit racers and enthusiasts by offering useful insights into chassis engineering and answers to questions. Readers may mail questions to: 155 Wankel Dr., Kannapolis, NC 28083-8200; submit questions by phone at 704-933-8876; or submit questions by e-mail to: markortizauto@windstream.net. Readers are invited to subscribe to this newsletter by e-mail. Just e-mail me and request to be added to the list.
CONTROL ARM LENGTH RATIO, AND RELATED CONSIDERATIONS
On the ratio of the upper control arm length to the lower control arm length you and Herb Adams are pretty much in agreement. Herb extends the idea a little by saying the key is to look at the swing arm length and even gives an idealized amount of 124 cm. and suggests this produces the least roll center migration. What do you think about this?
On a related idea, I'm now on to building a classic car with 27.1 in. tires. What do you feel would be a good length for the upper and lower control arms, and if I switch to 25in tires or 23 inch tires would this change your recommendation as to the length of the upper and lower control arm lengths? I have nothing that limits the track of my vehicle.
We always try for suspension properties that vary as little as possible as the suspension moves. We would like camber, caster, and jacking coefficients (geometric “anti’s”) to all be constant at all possible combinations of suspension displacement and sprung structure attitude. However, that is intrinsically impossible for various reasons.
Consequently, every design is a compromise. The objective is not to make sure any of the properties stay constant, but rather to make sure none of them vary excessively or stray into ranges that will cause serious problems.
The usual concern about “roll center migration” stems from the erroneous belief that the intersection of the front view force lines is always the roll center, and that if it moves laterally, the car behaves erratically. This isn’t really true, but if the force line slopes change rapidly, that can make the car behave erratically.
When the front view projected lower control arms are around fifteen inches long, and the upper ball joint is a little below the wheel rim, and the lower ball joint is about half as far from the ground as the upper, a control arm length ratio around 2:3 (upper arm around ten inches) will make the force line slopes stay fairly constant as the car rolls. Therefore, a 2:3 ratio is a common rule-of-thumb recommendation.
Note that if the force line slopes don’t change in roll, they will change in ride by about two degrees per inch of travel. For a symmetrical car of normal proportions, that makes the roll center approximately go up and down with the sprung structure. This demonstrates that we can’t hold everything constant at once.
To make the force line slopes stay constant in ride, we need to make the control arm lengths consistent with the rule developed by Maurice Olley: upper to lower control arm length ratio should be the same as the lower to upper ball joint height ratio. If the upper ball joint is twice as high as the lower, the lower arm should be twice as long as the upper.
Some early Chevy SLA suspensions, up through 1954 (up through 1962 on Corvettes), were built this way. In the first version of these, introduced in 1939, the arms have very nearly a 1:2 length ratio.
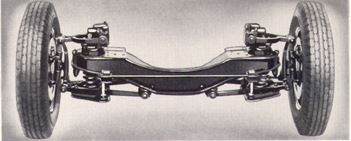
From a 1939 Chevy ad
In the last versions (’54 sedan, C1 Vette), the front view projected control arms still have about a 1:2 length ratio. The arms themselves don’t have that length ratio but they have diagonal pivot axes as seen from above. At the axle plane, the pivot axes for the lowers are almost at the car’s centerline and the pivot axes for the uppers are in the vicinity of the frame rails. In all versions, upper and lower front view projected control arms are close to horizontal at static ride height. The design objective here was to make the contact patches move straight up and down in normal driving, primarily to minimize tire wear.
The previous “original knee action” design, actually a Dubonnet suspension, used a simple single trailing arm that let the wheel move in a vertical plane. The “perfected knee action” shown above was a completely different system. The Dubonnet design suffered from poor structural properties, oil leakage, and severe pro-dive in braking. GM “perfected” it by throwing it out completely and starting over. However, GM engineers thought the vertical movement was a good thing, so they were trying to keep the vertical movement while addressing the other problems.
When the control arms are all horizontal, then regardless of their length, the force lines are horizontal. Therefore they coincide and it is impossible to define a single intersection. Both wheels have jacking coefficients of zero. There is no geometric anti-roll or pro-roll. The roll center is at ground level. If the car is cornering and rolls a bit and the force line angles exactly change angle with the sprung structure, they are then parallel and have no intersection. However, the outside wheel now has a bit of anti-roll and the inside one has a bit of pro-roll. Because the ground plane forces are bigger on the outside wheel, there is net anti-roll: the roll center is just slightly above ground. If the force lines are just a hair out of parallel they have an intersection that could be miles from the car and way above or below ground. If the car moves just a little, the intersection could be miles on the other side of the car. But the jacking coefficients aren’t changing much.
These cars exemplify a case where the force line slopes change in roll, and the so-called kinematic roll center can migrate wildly. Yet the cars are not erratic. They lean. They plow. But they’re not squirrely.
Is there a front view swing arm length (FVSA) that minimizes changes in jacking coefficient, force line slope, or so-called kinematic roll center location, as the car rolls? No, there isn't. There is no particular relationship at all.
However, there are quite a few other relationships that might be pertinent here.
FVSA does relate to changes in camber: to camber gain, or rate of camber change with respect to suspension displacement, or first derivative of camber with respect to displacement. Within the range normally seen, long FVSA gives little camber change in ride and lots of camber change in roll. Short FVSA produces the reverse: lots of camber change in ride and little in roll.
There is a relationship between control arm length ratio and change in FVSA with suspension displacement. When the upper arm is shorter than the lower, the FVSA shortens as the suspension compresses and lengthens as the suspension extends. If the arms are parallel at static, the FVSA is undefined at static, positive and decreasing as the suspension compresses from static, and negative and increasing (or decreasing negative; decreasing in absolute value). This produces poor camber recovery in roll on the inside wheel. In some cases camber recovery can be negative: the inside wheel leans out of the turn more than the body does, even with no static negative camber, and runs on just the inboard edge of its tread.
I like to speak of camber velocity (first derivative of camber with respect to suspension displacement) and camber acceleration (second derivative of camber with respect to displacement; first derivative of camber velocity with respect to displacement). FVSA governs camber velocity. Control arm length ratio governs camber acceleration. Note that this is my own terminology. It is not in general use and does not have SAE or ISO recognition. If you use it you should explain it.
Using this vocabulary, here are some simple rules:
1. Making the control arm lengths more equal reduces camber acceleration.
2. Within usual ranges, making the control arm lengths more unequal reduces changes in jacking coefficients.
3. Making both control arms longer reduces both camber acceleration and changes in jacking coefficients, but uses up room and adds a bit of control arm mass.
4. Spreading the control arms further apart (longer upright) makes the system act as though the arms were more equal.
5. Lowering both ball joints will make the system act as though the arms were more equal.
6. Cars will run well with a wide range of properties in these regards, but it is desirable to make the properties as similar as possible at the front and rear.
It should be apparent that for most cars, control arm length ratio comes down to a compromise between controlling variation in jacking coefficient and controlling variation in camber properties. The only thing that helps both at once is making both arms longer. There will inevitably be practical limits to that, but it does pay to be aware of this early in the design process.
So what about the case where we have a car on tall tires and we fit a set with a loaded radius an inch or two smaller, perhaps when switching from street tires to track tires? Do we need different control arm lengths? In most cases, no. The car will act as though the control arm lengths were a bit more equal when we put on the track tires, but it shouldn’t be a problem.